

 Для управления асинхронным двигателем могут использоваться тиристоры в сочетании с релейно-контакторными аппаратами. Тиристоры применяются в качестве силовых элементов и включаются в статорную цепь, релейно-контакторные аппараты включаются в цепь управления.
Для управления асинхронным двигателем могут использоваться тиристоры в сочетании с релейно-контакторными аппаратами. Тиристоры применяются в качестве силовых элементов и включаются в статорную цепь, релейно-контакторные аппараты включаются в цепь управления.
Используя тиристоры в качестве силовых коммутаторов, можно на статор при пуске подавать напряжение от нуля до номинального значения, ограничивать токи и моменты двигателя, осуществлять эффективное торможение либо шаговый режим работы. Такая схема приведена на рис. 1.
Силовая часть схемы состоит из группы тиристоров VS1...VS4, включенных встречно-параллельно в фазы А и С. Между фазами А и В включен короткозамыкающий тиристор VS5. Схема состоит из силовой цепи (рис. 1, а), цепи управления (рис. 1, б) и блока управления тиристорами — БУ (рис. 1, в).
Для пуска двигателя включается автоматический выключатель QF, нажимается кнопка SB1 «Пуск», в результате чего включаются контакторы КМ1 и КМ2. На управляющие электроды тиристоров VS1...VS4 подаются импульсы, сдвинутые на 60° относительно питающего напряжения. К статору двигателя прикладывается пониженное напряжение, что приводит к снижению пускового тока и пускового момента.
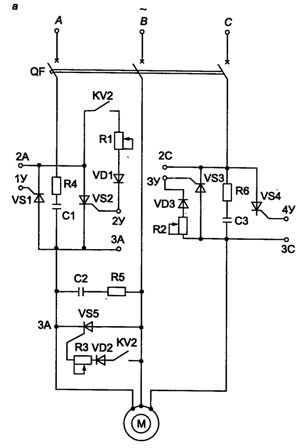
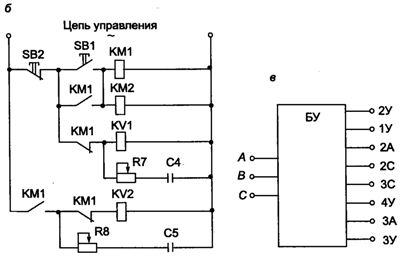
Рис. 1. Тиристорное управление асинхронным двигателем с короткозамкнутым ротором
Размыкающий контакт КМ1 отключает реле KV1 с выдержкой времени, которая определяется резистором R7 и конденсатором С4. Размыкающими контактами реле KV1 шунтируются соответствующие резисторы в блоке управления, и на статор подается полное напряжение сети.
Для торможения нажимается кнопка SB2 «Стоп». Схема управления теряет питание, отключаются тиристоры VS1...VS4. Это приводит к тому, что на период торможения включается реле KV2 за счет энергии, запасенной конденсатором С5, и своими контактами включает тиристоры VS2 и VS5. Через фазы А и В статора проходит постоянный ток, который регулируется резисторами R1 и R3. Обеспечивается эффективное динамическое торможение.