

 Подвесные электротележки (электрифицированные тали, тельферы и кран-балки) применяют для подъема и перемещения грузов и деталей машин при монтажных и ремонтных работах внутри производственных помещений. Электротали, тельферы и кран-балки меньше мостовых кранов, что сокращает размеры промышленных зданий, а их обслуживание не требует квалифицированного персонала.
Подвесные электротележки (электрифицированные тали, тельферы и кран-балки) применяют для подъема и перемещения грузов и деталей машин при монтажных и ремонтных работах внутри производственных помещений. Электротали, тельферы и кран-балки меньше мостовых кранов, что сокращает размеры промышленных зданий, а их обслуживание не требует квалифицированного персонала.
Подвесные электротележки предназначены для подъема и перемещения грузов на производственных объектах по строго определенному пути.
Подвесная электротележка (рис. 1) состоит из 3 основных частей: грузоподъемного механизма (электроталь), предназначенного для подъема (опускания) и удержания груза, механизма передвижения (ходовая тележка), предназначенного для перемещения поднятого груза в строго определенном направлении, монорельса, определяющего горизонтальное движение в двух направлениях.
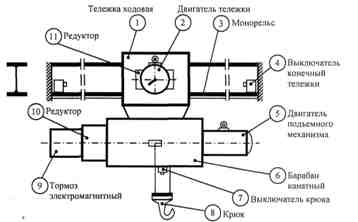
Рис. 1. Кинематическая схема подвесной электротележки
Электроталъ смонтирована на ходовой тележке и включает следующее оборудование: электродвигатель (5) подъемного механизма, редуктор (10) цилиндрический, для снижения частоты вращения электродвигателя до величины, обеспечивающей заданную линейную скорость подъема (опускания) крюка, электромагнитный тормоз (9), для затормаживания вала двигателя при отключении его от сети или исчезновения напряжения в сети, применяется колодочный тормоз, работающий от усилия пружин при охвате вала колодками, выключатель конечный (7) крюка, для ограничения подъема крюка, при нажатии на него двигатель отключается от сети и затормаживается, барабан канатный (6), для сматывания (разматывания) и хранения каната, крюк (8), для крепления поднимаемого груза.
Ходовая тележка смонтирована на монорельсе (3), опирается ходовыми колесами на нижние полки двутавровой балки. Привод на колеса через цилиндрический редуктор (11) от электродвигателя (2).
Монорельс - двутавровая балка с конечными выключателями (4) на концах, для ограничения горизонтального хода.
Электроталь ТЭП-1 (грузоподъемность 1 т, напряжение 380 В) состоит из механизмов подъема и передвижения с индивидуальными электроприводами. Рабочий барабан 2 приводится двигателем 20 через планетарный редуктор, образованный из сателлитов 5, 7, 8, блочных шестерен 13, солнечных шестерен 6, 9, водил 14, 15. Главный приводной вал 4 при отключенном двигателе затормаживается дисками 10 под действием пружины 11.
Для привода механизма подъема груза со скоростью 6,5 - 6,9 м/с применяется асинхронный двигатель с повышенным скольжением типа АОС-32-4М (мощность 1,4 кВт при 1320 об/мин и ПВ = 25%). Движение крюка вверх ограничивается конечным выключателем.
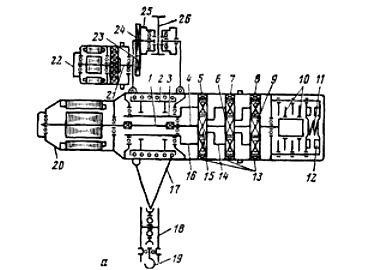
Рис. 2. Электропривод электротали ТЭП-1: 1 - рабочий барабан, 3 - полый вал, 4 - рабочий вал, 5, 7, 8 - сателлиты, 6, 9, 15 - солнечные шестерни, 10 - тормозные диски, 11 - тормозная пружина, 12 - электромагниты, 13 - блочные шестерни, 14, 16, 21 - водила, 17 - трос, 18 - подвеска, 19 - крюк, 20 - электродвигатель подъема груза, 22 - электродвигатель тележки, 23, 24 - шестерни, 25 - каток, 26 - монорельс.
На рисунке 3 показаны рабочие характеристики тали. КПД электротали возрастает до 0,58 с увеличением массы поднимаемого груза до 1000 кг.
Интересен режим работы двигателя 4 при опускании груза: пока масса груза менее 425 кг, электродвигатель работает в двигательном режиме, а когда масса свыше 425 кг - в генераторном. Следовательно, для преодоления момента холостого хода механизма подъема достаточен груз массой 425 кг.
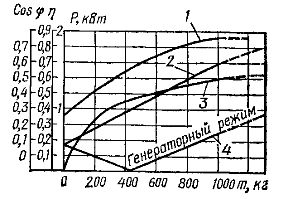
Рис. 3. Рабочие характеристики электрической тали: 1 - соsфи электродвигателя, 2 - мощность электродвигателя при подъеме груза, 3 - КПД, 4 - мощность электродвигателя при опускании груза.
Для привода ходовой тележки электротали применен асинхронный электродвигатель 22 (рис. 2) типа ТЭМ- 0,25 (мощность 0,25 кВт при 1410 об/мин и ПВ = 25%) со встроенным планетарным одноступенчатым редуктором и шестеренчатой передачей 23, 24, передающей вращение на катки 25. На механизмах передвижения простейших талей тормозные устройства не устанавливают. Передвижение тали по балке в обе стороны ограничивают механические упоры.
 Кран-балка отличается от тали тем, что балка, по которой передвигается таль, может перемещаться вдоль производственного помещения, приводимая в движение электродвигателем с короткозамкнутым или фазным ротором. Мост кран-балки, имеющий механизм перемещения с электроприводом, выполнен в виде одной балки, по которой движется ходовая электротележка.
Кран-балка отличается от тали тем, что балка, по которой передвигается таль, может перемещаться вдоль производственного помещения, приводимая в движение электродвигателем с короткозамкнутым или фазным ротором. Мост кран-балки, имеющий механизм перемещения с электроприводом, выполнен в виде одной балки, по которой движется ходовая электротележка.
Для привода подвесных электротележек применяются трехфазные асинхронные двигатели с короткозамкнутым ротором и лишь при большой грузоподъемности и необходимости регулирования скорости и плавной «посадки» грузов - асинхронные двигатели с фазным ротором.
Из-за отсутствия низкой скорости, необходимой для плавной посадки грузов или точной остановки кран-балки, рабочему приходится периодически включать и отключать электродвигатели, а это увеличивает число включений и вызывает нагрев обмоток, а также снижает износостойкость контактов. Поэтому на некоторых кран-балках имеются электроприводы подъема и передвижения с двумя рабочими скоростями: номинальной и пониженной, которые обеспечиваются использованием двухскоростных асинхронных двигателей вместо односкоростных или дополнительного микроривода.
 Подвесными электротележками с небольшой скоростью перемещения (0,2 - 0,5 м/с), имеющими привод от двигателей с короткозамкнутым ротором, обычно управляют с уровня пола (земли) при помощи подвесных кнопочных станций. В подвесных тележках и кран-балках с кабиной для оператора (при скорости движения 0,8 - 1,5 м/с) двигателями с фазным ротором управляют с помощью контроллеров.
Подвесными электротележками с небольшой скоростью перемещения (0,2 - 0,5 м/с), имеющими привод от двигателей с короткозамкнутым ротором, обычно управляют с уровня пола (земли) при помощи подвесных кнопочных станций. В подвесных тележках и кран-балках с кабиной для оператора (при скорости движения 0,8 - 1,5 м/с) двигателями с фазным ротором управляют с помощью контроллеров.
Электродвигателями талей и кран-балок управляют при помощи реверсивных магнитных пускателей и пусковых кнопок, подвешиваемых на гибком бронированном кабеле. Напряжение к катушкам и контактам контакторов подъема КМ1 (рис. 4), спуска КМ2, передвижения вперед КМЗ и назад КМ4 подводится через автоматический выключатель и кабель или контактные провода. Движение подъемного устройства вверх ограничивает конечный выключатель SQ.
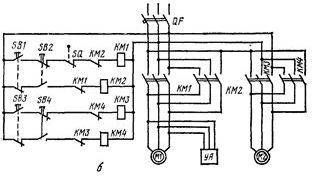
Рис. 4. Схема электрическая принципиальная кран-балки
Блокировка реверсивных контакторов двигателей от одновременного включения осуществляется двухцепными кнопками и механической блокировкой самих контакторов (или размыкающими блок-контактами контакторов).
На электроталях и кран-балках не применяют шунтирование пусковых кнопок соответствующими замыкающими блокировочными контактами контакторов, предотвращая вероятность продолжения работы тали после отпускания оператором подвесной кнопочной станции. Одновременно с двигателем подъема включается электромагнит УА, размыкающий тормоз.
Максимально допустимое время пуска для механизмов подъему составляет 3 - 5 с, для механизмов передвижения - 10 - 15 с.
Можете посмотреть также: Электрооборудование и схемы электрических талей
Режим работы двигателей подвесных электротележек, электроталей и кран-балок зависит от их назначения. Если грузы перемещают к мостовым кранам на небольшие расстояния, то двигатели работают в позорно-кратковременном режиме (например, у тележек, обслуживающих участки цехов или складов).

Для кран-балок транспортирующих грузы по территории завода на относительно большие расстояния, режимы работы двигателей подъема и перемещения различны: для первых характерен кратковременный режим, для вторых - длительный. Мощность двигателей подъема и перемещения электроталей, тельферов и кран-балок определяется так же, как для двигателей механизмов мостовых кранов.