

Энкодеры являются устройствами для измерения угловых перемещений. Они широко используются в системах автоматизации, робототехнике и сервоприводах для определения положения и скорости вращающихся объектов.
Оптический энкодер основан на преобразовании движения шарнира в серию световых импульсов, которые затем преобразуются в электрические импульсы.
Для генерации световых импульсов необходим источник света, обычно светодиод. Преобразование света в электрические импульсы выполняется фототранзистором или фотодиодом, преобразующим свет в электрический ток.

Схема оптического энкодера, оценивающего угловое положение шарнира, представлена на рисунке 1.
Оптический энкодер состоит из источника света с линзой, светодетектора (приемника света) и вращающегося диска с прорезями, который соединен с осью двигателя или шарнира.
На вращающемся диске имеется дорожка с прорезями и промежутками, которые попеременно либо пропускают, либо блокируют свет от светодиода к фототранзистору.
Логический выход датчика высокий, когда свет проходит через прорезь и попадает на фототранзистор с другой стороны вращающейся пластины. Когда путь между светодиодом и фототранзистором блокируется промежутком между двумя прорезями, логический выход низкий.

Рис. 1. Схема оптического энкодера
Оптические энкодеры делятся на абсолютные и инкрементальные. Они различаются по принципу работы и способу измерения углового положения.
Абсолютные энкодеры фиксируют истинное угловое положение вала. Каждому положению соответствует уникальный код, что позволяет энкодеру выдавать точные данные о положении даже после отключения питания.
При включении устройства оно сразу предоставляет информацию о текущем положении. Они не требуют повторной настройки после обесточивания и позволяют точно определять положение вала в любой момент времени, даже если устройство не вращалось.
Инкрементальные энкодеры измеряют изменения углового положения, генерируя импульсы при каждом перемещении.
Для определения текущего положения необходимо подсчитывать количество импульсов, что требует установки устройства в начальное положение перед началом работы. У них более простая конструкция и, как правило, более низкая стоимость по сравнению с абсолютными энкодерами.
Давайте подробно рассмотрим основные свойства и отличия абсолютных и инкрементальных энкодеров на примере применения их в робототехнике.
Абсолютный энкодер
Абсолютный оптический энкодер — это устройство, которое измеряет абсолютное угловое положение соединения. Его выходной сигнал является цифровым.
В цифровой системе каждая логическая линия сигнала представляет один бит информации. При объединении всех этих битов в одну логическую переменную количество всех возможных логических состояний определяет количество всех абсолютных угловых положений, которые могут быть измерены энкодером.
Предположим, что мы хотим измерить угловое вращение на 360° с разрешением 0,1°. Абсолютный энкодер должен различать 3600 различных логических состояний, что означает, что нам нужно как минимум 12 бит для оценки углов соединения с требуемым разрешением. С 12 битами мы можем представить 4096 логических состояний.
Важным параметром проектирования абсолютных энкодеров является количество логических состояний, которое зависит от требований задачи и места установки энкодера (до или после редуктора).
Когда энкодер установлен до редуктора с передаточным числом kr, разрешение измерения угла увеличивается на коэффициент kr. Когда энкодер установлен за редуктором, необходимое разрешение энкодера напрямую определяется требуемым разрешением измерения угла соединения.
Все логические состояния должны быть равномерно выгравированы на вращающемся диске энкодера.
Пример абсолютного энкодера с шестнадцатью логическими состояниями показан на рисунке 2.
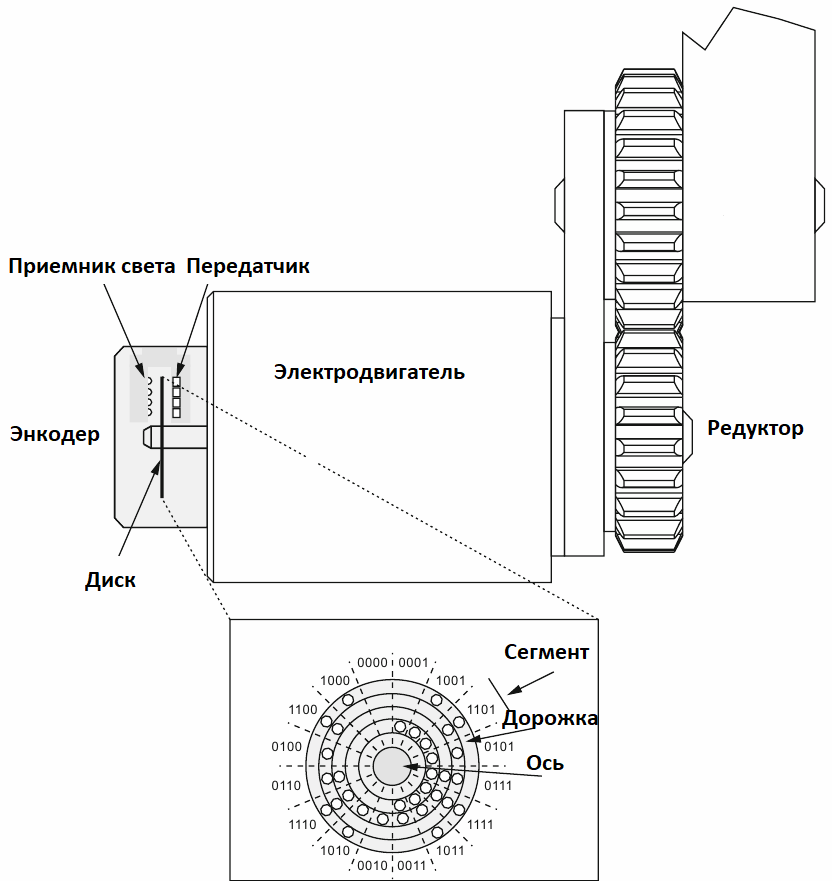
Рис. 2. Схема абсолютного энкодера
Шестнадцать логических состояний могут быть представлены четырьмя битами. Все шестнадцать логических состояний выгравированы на поверхности вращающегося диска.
Диск радиально разделен на четыре дорожки, представляющие четыре бита. Каждая дорожка разделена на шестнадцать сегментов, соответствующих логическим состояниям.
Поскольку информация об угловом смещении представлена четырьмя битами, нам нужны четыре пары светодиодов и фототранзисторов (по одной паре на каждый бит).
При вращении диска, который соединен с осью двигателя или соединения, выходной сигнал будет изменяться в соответствии с логическими состояниями, определенными порядком сегментов (обычно используется код Грея, где два последовательных значения отличаются только одним битом).
Код Грея — это двоичный код, в котором любые два соседних кода различаются только одним битом. Иными словами, расстояние Хэмминга (метрика, используемая для измерения различий между двумя строками одинаковой длины) между соседними кодовыми комбинациями равно 1.
Например, для 4-битного кода Грея последовательность будет выглядеть так:
0000 - 0001 - 0011 - 0010 - 0110 - 0111 - 0101 - 0100 - 1100 - 1101 - 1111 - 1110 - 1010 - 1011 - 1001 - 1000
Абсолютный энкодер определяет не только угловое положение соединения, но и направление вращения.
Инкрементальный энкодер
В отличие от абсолютных энкодеров, инкрементальные энкодеры предоставляют информацию только о изменениях углового положения соединения.
Преимущества инкрементальных энкодеров по сравнению с абсолютными заключаются в их простоте, меньших размерах и, что наиболее важно, низкой стоимости. Это достигается за счет уменьшения количества дорожек на вращающемся диске до одной.
Вместо того чтобы иметь столько дорожек, сколько необходимо для представления всех требуемых логических состояний, используется только одна дорожка с равномерным распределением прорезей по ободу диска.
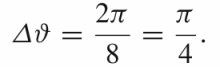
На рисунке 3 показана схема инкрементального энкодера.
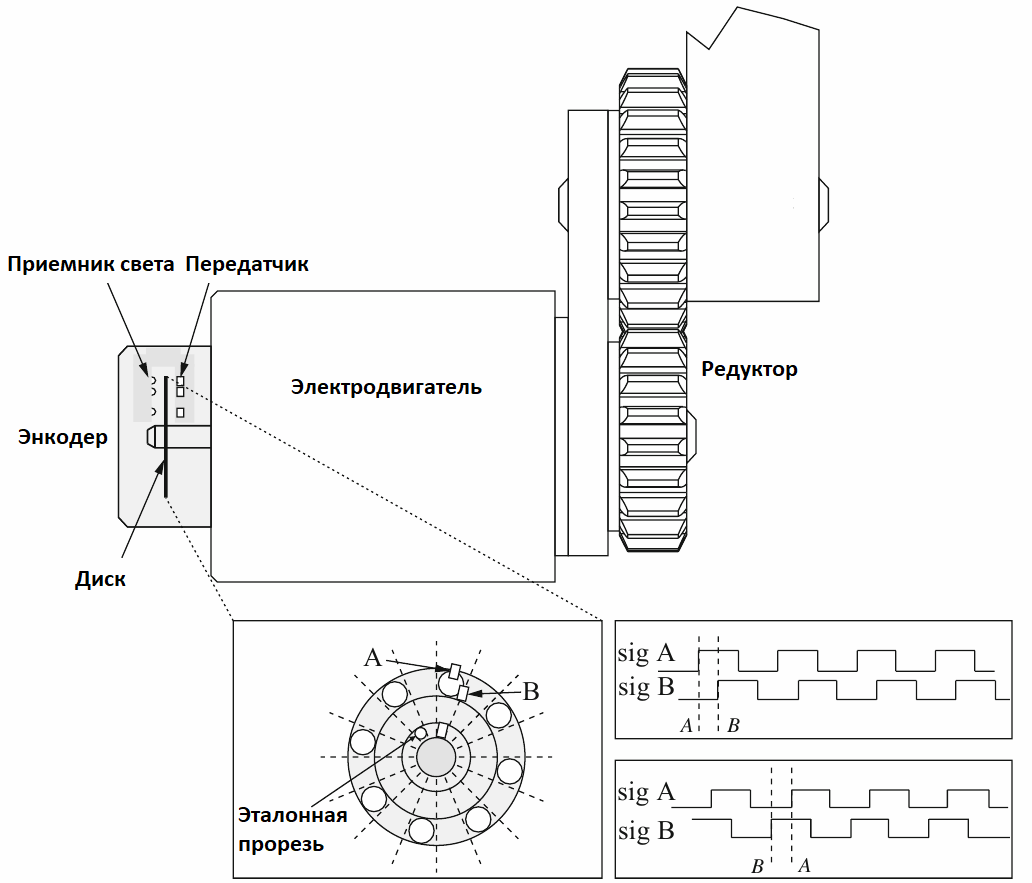
Рис. 3. Схема инкрементального энкодера
Одна дорожка требует лишь одной пары светодиод-фототранзистор (оптическая пара). Во время вращения закодированного диска генерируется последовательность электрических импульсов.
Измерение смещения соединения основано на подсчете этих импульсов, количество которых пропорционально смещению соединения робота.
Инкрементальный энкодер, показанный на рисунке 3, генерирует восемь импульсов за один оборот. Разрешение этого энкодера составляет:
Увеличивая количество прорезей на диске, можно повысить разрешение энкодера. Обозначив количество прорезей как nc, общее уравнение для разрешения энкодера можно записать следующим образом:
Энкодер с одной дорожкой способен оценивать только изменение углового положения соединения. Он не может предоставить информацию о направлении вращения или абсолютном положении соединения.
Для использования инкрементальных энкодеров в управлении роботом необходимо определить начальное положение, представляющее собой эталон для измерения изменения положения соединения, и направление вращения.
Проблема начального положения решается добавлением дополнительной эталонной прорези на диске. Эта эталонная прорезь смещена радиально относительно прорезанной дорожки, измеряющей угловое положение.
Для обнаружения начального положения требуется дополнительная оптическая пара. При поиске эталонной прорези автоматическая установка или робот запрограммированы на движение с низкой скоростью до тех пор, пока не будет достигнута эталонная прорезь или конечное положение диапазона движения соединения. В последнем случае робот движется в противоположном направлении к эталонной прорези.
Проблема определения направления вращения решается с помощью другой пары светодиод-фототранзистор. Эта дополнительная оптическая пара смещена тангенциально и радиально от первой оптической пары.
При вращении диска получаются два сигнала, которые из-за смещения оптических пар сдвинуты по фазе. Этот фазовый сдвиг происходит потому, что каждая прорезь на диске сначала достигает первой оптической пары, а затем, с небольшой задержкой, второй пары.
Оптические компоненты обычно размещаются таким образом, чтобы между двумя сигналами получался фазовый сдвиг в pi/2. При вращении по часовой стрелке сигнал B отстает по фазе на pi/2 от сигнала A. При вращении против часовой стрелки сигнал B опережает сигнал A на pi/2.
Направление вращения энкодера можно определить на основе фазовых сдвигов между сигналами A и B.
Еще одно преимущество наличия двух оптических пар заключается в возможности подсчета всех изменений как в сигналах A, так и в сигналах B.
Подход, известный как квадрантурное декодирование, позволяет увеличить разрешение измерения в четыре раза по сравнению с номинальным разрешением энкодера. Вместо того чтобы просто подсчитывать импульсы одного сигнала, система отслеживает изменения в обоих сигналах. Это позволяет фиксировать более мелкие изменения в положении вала.
Сигналы A и B могут находиться в четырех различных состояниях, что позволяет системе различать более мелкие шаги вращения. Например, если один шаг соответствует одному импульсу, то с квадрантурным декодированием один и тот же шаг может быть представлен как четыре различных состояния.
Таким образом, использование фазового сдвига между сигналами A и B в оптических энкодерах позволяет точно определять направление вращения и увеличивать разрешение измерения.
Андрей Повный, Филиал БГТУ Гомельский государственный политехнический колледж