

Сервоприводы и шаговые двигатели — это два типа электрических приводов, которые используются для управления положением, скоростью или углом поворота вала. Они имеют разные принципы работы, характеристики и области применения.

Сервопривод — это система, состоящая из электродвигателя, датчиков обратной связи и контроллера. Сервопривод может обеспечивать высокую точность, скорость и момент при перемещении вала в заданное положение.
Сервопривод постоянно сравнивает текущее положение вала с желаемым и корректирует его в реальном времени. Они требуют сложного управления и настройки, но они более эффективны и тихи при работе.
Сервоприводы применяются в промышленности, робототехнике, авиации и других областях, где требуется высокая динамика и точность перемещения.
Шаговый двигатель — это электродвигатель, который делит один оборот на определенное количество шагов. Он поворачивает вал на один шаг при получении каждого электрического импульса от контроллера.
Шаговый двигатель не имеет датчиков обратной связи, поэтому он не может контролировать свое положение и скорость. Он может пропускать шаги или останавливаться при слишком большой нагрузке или скорости.
Такой двигатель проще в управлении и настройке, но он менее точный, быстрый и мощный, чем сервопривод. Он также издает сильный гул при работе.
Шаговые двигатели применяются в бытовой технике, офисной технике, 3D-принтерах и других областях, где требуется низкая стоимость и простота привода.
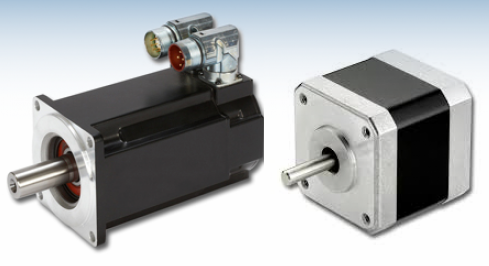
Шаговый двигатель
Шаговый двигатель относится к классу синхронных электрических машин. Его статор содержит несколько полюсных выступов, каждый из которых имеет индивидуальную обмотку возбуждения.
Ротор шагового двигателя оснащен ярко выраженными магнитными полюсами, как правило, это постоянные магниты, закрепленные на подвижном валу или цилиндре так, чтобы иметь возможность очень точно взаимодействовать с возбуждаемыми токами обмоток полюсами статора.
Полюса статора могут перемагничиваться с определенной частотой, их возбуждение осуществляется путем подачи импульсов в соответствующие обмотки.
Таким образом, для получения от шагового двигателя определенной угловой скорости вращения ротора, на обмотки статора последовательно подаются импульсы определенной частоты и длительности, а положение рабочего органа отслеживается лишь косвенно, по количеству сделанных «шагов», ведь магниты, как ожидается, должны следовать за полюсами.

Можно сказать, что шаговый двигатель — лучший вариант бесколлекторного мотора для тех применений, где необходимо точно задавать угловую скорость вращения ротора, но точность непосредственно положения не чрезвычайно критична. Ибо если по какой-то внешней причине в процессе поворота ротора случится физическая его задержка, то импульсы хотя и будут поданы в нужном количестве и с правильными параметрами, с расчетом на определенный результат, на деле их «эффективное количество» окажется меньшим, и управляемый рабочий орган не окажется, быть может, в правильной позиции. Тем не менее, для пылесоса или квадрокоптера шаговый двигатель вполне подойдет.
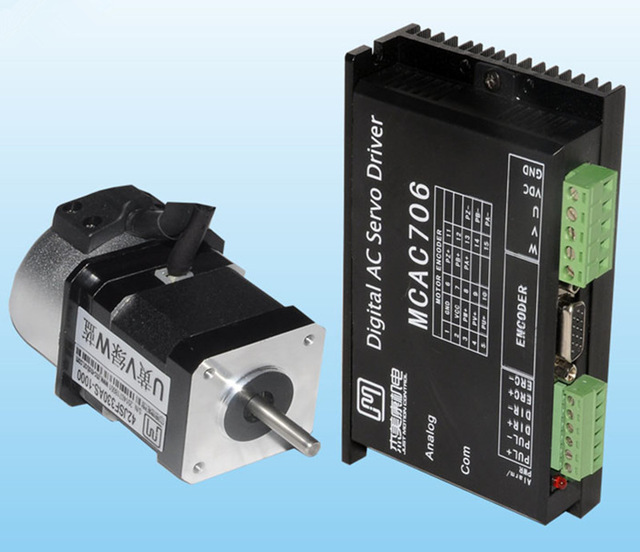
Сервопривод
Сервопривод — тоже синхронная электрическая машина, но принципиально более точная, чем шаговый двигатель. Сервопривод потому и называется приводом, а не просто двигателем (серво — значит следящий), что он обязательно включает в себя не только двигатель (например тот же шаговый), но и схему управления и слежения за процессом.
Обязательная составляющая сервопривода — датчик положения рабочего органа, в некоторых случаях - ротора. Например, в станках с ЧПУ для управления положением рабочего инструмента необходим именно сервопривод.
В сервоприводе имеется система обратной связи по положению, углу поворота вала и т. д.
Принцип работы севропривода заключается в следующем. Контроллер получает заданный сигнал от внешнего источника, например, компьютера или датчика. Заданный сигнал определяет, какое положение, скорость или угол поворота должен иметь электродвигатель. Контроллер также получает обратный сигнал от обратной связи, который показывает, какое положение, скорость или угол поворота имеет электродвигатель в данный момент.
Контроллер сравнивает заданный и обратный сигналы и вычисляет ошибку - разницу между ними. Если ошибка не равна нулю, то контроллер выдает корректирующий сигнал на электродвигатель, который изменяет его положение, скорость или угол поворота таким образом, чтобы уменьшить ошибку.
Таким образом, контроллер поддерживает постоянное соответствие между заданным и фактическим положением электродвигателя.
Если шаговый двигатель просто считает «шаги» (сколько должен бы прошагать ротор в секунду от поданного количества импульсов, чтобы оказаться в месте назначения), то сервопривод ориентируется на непосредственный результат, на реальное (а не теоретическое!) положение рабочего органа.
В зависимости от текущего состояния, схема логики делает корректировку, независимо от того, случилось ли проскальзывание ротора, был ли люфт, или, скажем, зацепилась ли движущаяся часть станка за какой-то предмет.
Севропривод имеет ряд преимуществ по сравнению с другими видами приводов:
- Во-первых, он обладает высокой точностью и скоростью реакции, так как контроллер постоянно корректирует положение электродвигателя в соответствии с заданным сигналом.
- Во-вторых, он имеет широкий диапазон регулирования скорости и момента, так как контроллер может изменять частоту и амплитуду напряжения на электродвигателе.
- В-третьих, он имеет низкий уровень шума и вибрации, так как электрический сигнал передается без механических передач.
Принципиальные практические различия
-
Сервопривод способен очень интенсивно ускоряться за счет возможности варьирования тока обмоток возбуждения. Шаговый двигатель набирает скорость значительно медленнее.
-
Момент сервопривода регулируется, и может быть повышен с ростом скорости. Момент шагового двигателя на повышенной скорости падает.
-
У сервопривода ток обмоток возбуждения пропорционален нагрузке, а у шагового двигателя изначально есть существенные ограничения по моменту.
-
Шаговый двигатель не предполагает корректировку по положению, а сервопривод в этом плане более гибок.
-
Сервопривод может очень точно позиционироваться (например по энкодеру), а шаговый двигатель позиционируется лишь косвенно.
-
Сервопривод требует более внимательного подхода к проектированию и настройке схемы управления, особенно в плане безопасности, так как если у шагового двигателя заклинит вал, он просто начнет пропускать шаги, а сервопривод может начать усердствовать, повышать ток, и в результате сгореть или повредить рабочий механизм.